
AC Motors
4 AC Motors
A common feature of all AC motors is a rotating magnetic field produced by the stator windings.
This concept can be illustrated for three phase motors by considering three coils placed equally around the rotor. Each coil is connected to one phase of a three phase power supply (Figure 4-1).
Figure 4-1: Development of a Rotating Magnetic Field
Figure 4-2: Resulting Fields
The current through each coil varies sinusoidal with time, 120o out of phase with the other coils. This means that the current in coil B is delayed by 1/3 of a period from that in A, and the current in coil C is delayed 1/3 of a period from that in B (Figure 4-2).
The rotor sees the net rotating magnetic field created by the three coils and rotates, creating the torque on the motor drive shaft. This field rotates either clockwise or counter clockwise, depending on the order of the phases connected to the motor.
Reversing a 3-phase motor's direction is simply achieved by changing the connection order of two of the three conductors.
The rotating field speed depends on the number of magnetic poles in the stator and is referred to as the synchronous speed.

Frequency refers to the power supply frequency (e.g. 60 Hz).
The number of magnetic poles (or simply poles) is the principal design factor affecting speed in AC motors.
a. 3-Phase Induction Motors
The rotor of an induction motor does not rotate at synchronous speed or the speed of the magnetic field of the stator, but lags slightly. This lag is usually expressed as a percentage of the synchronous speed called "slip." Motor slip is the result of the interaction between the magnetic field of the stator and the magnetic field resultant from the induced currents flowing in the rotor. The rotor bars cut through the magnetic lines of force resulting in useful torque being produced. As the motor slows down (i.e. slip increases) when load is added, more torque is created.

3-phase induction motors are very robust and reliable and are the most common type of motor in use.
Unfortunately, power factor tends to be poor for reduced loads. This is due to the current that is supplied to just maintain magnetic field.
b. Squirrel Cage Motors
The rotor of a squirrel cage motor is made of conductive bars that are parallel to the shaft and short circuited by the end rings in which they are physically supported (Figure 4-3).
Figure 4-3: Squirrel Cage
Bar size, shape and resistance significantly influence torque-speed characteristics. A break in a rotor bar or end ring connection can lead to a more serious condition including high frequency vibrations and even motor failure.
In order to facilitate the selection of motors, NEMA (National Electrical Manufacturers Association) has assigned letter designations A, B, C and D to describe standard torque-speed design characteristics of squirrel cage motors up to 200 HP (Table 4 1 & Figure 4-4).
| Design Type |
Starting Torque |
Starting Current |
Breakdown Torque |
Full Load Slip |
Typical Applications |
|---|---|---|---|---|---|
| A Seldom used |
normal | high | high | <5% | machine tools, fans, pumps |
| B | normal | normal | normal | <5% | same as A |
| C | high | normal | low | <5% | compressors, crushers, conveyors |
| D | very high | low | n/a | >5% | punch presses, high inertial loads elevators |
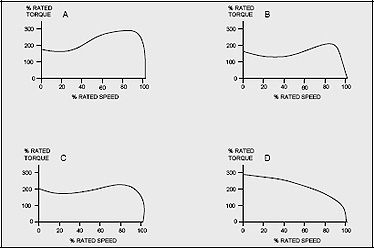
Figure 4-4: Torque-Speed Graphs of Design A, B, C, D Motors
Design type B is the most common and suits the majority of motor applications.
Design A motors are not generally specified today due to the high starting current. Design B motors should be specified instead.
Motors are also referred to as being general, definite or special purpose.
A general purpose motor is any motor which is designed in standard ratings, such as those specified in the National Electrical Manufacturers Association (NEMA) Standards Publication MG1-1993, paragraph 14.02.
A definite purpose motor is any motor designed in standard ratings with standard operating characteristics or standard mechanical construction for use under service conditions other than usual, such as those specified in NEMA Standards Publication MG1-1993.
A special purpose motor is any motor (other than a general purpose motor or definite purpose motor) which has special operating characteristics or special mechanical construction (or both) designed for a particular application. Motors over 500 HP are usually considered special purpose rather than general purpose, and are designed for the specific application.
c. Wound Rotor Induction Motor
The wound rotor induction motor operates on the same principles as the squirrel cage motor, but differs in the construction of the rotor. Instead of shorted bars, the rotor is made up of windings which terminate at slip rings on the shaft.
This type of motor is used in special applications where a high starting torque is required. Connection of external resistance to the rotor circuit via the slip rings permits variation of motor torque-speed characteristics (Figure 4-5 & Figure 4-6). After starting, the slip rings are shorted together.
Shorting the external connection results in operation similar to squirrel cage motors.
Figure 4-5: Wound Rotor Induction Motor
Speed range variation of about 5:1 can be achieved by adding external resistance to the rotor circuit; however, this is at the expense of electrical efficiency unless a slip energy recovery circuit is used
Figure 4-6: Wound Rotor Torque-Speed Graph for Various External Resistances
The maximum torque that a wound rotor motor can produce is determined by the design of its rotor, but the speed at which this torque is developed depends on external rotor resistance.
Each wound rotor design has a family of torque-speed curves that correspond to various values of external rotor resistance.
d. Single Phase Induction Motors
When a single phase induction motor is running it develops a rotating magnetic field, but before the rotor begins to turn, the stator produces only a pulsating stationary field.
To produce a rotating field, and thus a starting torque, an auxiliary starting winding is placed at right angles to the main stator winding so that the currents through them are out of phase by 90o (1/4 of a period in time). This places the magnetic fields 90oout of alignment. As a result, the rotor wants to align the magnetic poles, which creates a starting torque. The physical placement of the start winding and its relative polarity to the main winding results in the motor consistently turning in one direction when started. Once the motor has started, the auxiliary winding is often removed from the circuit by a centrifugal switch.
A failed start winding circuit will result in a motor that makes a low humming sound and will start in either direction by carefully providing a slight spin by hand.
Single phase induction motors are used in applications where three phase power is not available, and are generally in the fractional horsepower to 10 HP range. Larger than 10 HP single phase motors are possible and are usually matched with power electronics to limit starting currents which would be very high otherwise.
| Motor Type | Starting Torque | Efficiency | Application |
|---|---|---|---|
| Shaded Pole | Low | Low | Direct Drive Fans |
| Split Phase | Low | Medium | Direct Drive Fans, Centrifugal Pumps, Air and Refrigeration Compressors |
| Medium | Medium | Belted Fans, Air and Refrigeration Compressors, Major Appliances | |
| Capacitor Start | Medium | Medium | Belted Fans, Compressors, Centrifugal Pumps, Industrial, Farm, Major Appliances, Commercial Appliances, Business Equipment |
| High | Medium | Positive Displacement Pumps, Air and Refrigeration Compressors. | |
| Capacitor Start / Run | Medium | High | Belted Fans, Centrifugal Pumps |
| High | High | Positive Displacement Pumps, Air and Refrigeration Compressors, Industrial, Farm, Major Appliances, Commercial Appliances, Business Equipment | |
| Permanent Split Capacitor | Low | High | Direct Drive Fans, Refrigeration Compressor, Business Equipment |
e. Split Phase Motors
Split phase motors use a starting winding with a different resistance/reactance ratio than that of the main stator winding to produce the phase difference required for starting (Figure 4 7).
The phase difference is not the desired 90°, and the magnetic fields are not equal. This results in a lower starting torque than other motor designs.
Figure 4-7: Split Phase Motor
Split phase motor starting torque, however, is sufficient for many applications such as refrigerated display case circulation fans and some power tools (e.g. drill press). This type of motor is cheap to produce and is therefore a favourite in OEM products. Typical sizes range up to about 1/2 HP.
f. Capacitor Motors
Many single phase motors use a capacitor in series with one of the stator windings to optimize the field phase difference for starting. Capacitive current leads voltage by 90o. Adding capacitance causes a phase shift in one winding relative to the other. The result is a higher starting torque than a split phase motor can produce.
Capacitor motors are used in high starting torque applications such as compressors and air conditioners. Typical sizes range up to about 10 HP.
Capacitor Run Motor
Capacitor run motors use a capacitor permanently connected in series with one of the start windings, to achieve a compromise between good starting torque and good running characteristics (Figure 4-8). This design is lower in cost than other capacitor motors that incorporate capacitor switching systems.
These motors achieve better starting torque and running characteristics than a split phase motor and are sometimes called permanent split capacitor (PSC) motors.
New furnace fan motors sometimes use capacitor run motors.
Figure 4-8: Capacitor Run Motor
Capacitor Start Motor
In capacitor start motors, a capacitor connected in series with the starting winding is sized to maximize starting torque (Figure 4-9).
Figure 4-9: Capacitor Start Motor
The starting winding is removed from the circuit by a centrifugal switch or electronic relay when the motor reaches running speed. Starting torque is higher than for capacitor run motors, with running performance similar to a split phase motor.
Capacitor Start - Capacitor Run Motors
This design uses a capacitor optimized for running characteristics in series with the main stator winding (Figure 4-10). A second capacitor in series with the starting winding optimizes starting torque. The starting capacitor is switched out of the circuit at running speed.
Sometimes the capacitor fails and the motor will not start. A simple test is to remove the capacitor and check with an ohmmeter (Ref. 2). If possible set to the highest ohms scale. Upon contact with the terminals, the ohm value should drop rapidly and then slow down and rise again. This means the capacitor should be operational. However, if the ohms go immediately to a low value near zero, the capacitor is shorted. If the value stays very high, the capacitor is open circuited. Installing a new capacitor of equal rating should remedy the problem.
Figure 4-10: Capacitor Start - Capacitor Run Motor
Both starting torque and running characteristics are optimized.
g. Shaded Pole Motors
A shaded pole motor is the simplest form of a single phase motor and is very low in cost (Figure 4-11).
It develops a rotating field by delaying the build up of magnetic flux through part of the pole structure.
Figure 4-11: Shaded Pole Motor
The shaded portion of the pole is isolated from the rest of the pole by a copper conductor that forms a single turn around it.
The magnetic flux in the unshaded portion increases with the current through its winding. Magnetic flux increases in the shaded portion; however, it is delayed by the current induced in the copper field.
The magnetic field sweeps across the pole face from the unshaded portion to the shaded portion, developing a torque in the squirrel cage.
To maximize torque, the rotor is made with relatively high resistance.
Shaded pole motors are used where low torque is acceptable (such as fans) and are usually less than 1/4 HP.
Due to their very low efficiency, shaded pole motors should only be used in applications where the motor is either very small or operates for very short periods of time (e.g. shower fan motor).
h. Synchronous Motors
A synchronous motor produces magnetic poles at fixed positions on the rotor.
These poles lock onto the rotating field of the stator and turn the rotor at synchronous speed based on the 60Hz supply frequency.
A simple way to determine the speed of a synchronous motor is to divide 3600 by half the number of poles. For example a 2 pole machine will turn at 3600 rpm, a 4 pole 1800 rpm, 6 pole 1200 rpm, etc.
There are several different types of single and 3-phase synchronous motors.
Synchronous motors are significantly more expensive than induction motors. Their use is typically limited to applications where uniform speed is absolutely required and motor slip cannot be tolerated (See Section 4 a).
Excited Rotor Synchronous Motor
The magnetic poles on the rotor are electromagnets supplied with direct current either by slip rings from a stationary external DC power supply or internally by an alternator mounted on the rotor shaft (brushless type) (Figure 4-12).
Figure 4-12: Exciter for Brushless Synchronous Motor
The amount of excitation can be adjusted by varying the rotor current on the brush-type motor or the alternator field excitation on the brushless type.
Altering the level of rotor excitation changes the power factor of the motor.
The motor can run with a lagging power factor (underexcited) or a leading power factor (overexcited).
An overexcited synchronous motor can be used to correct poor power factor in a plant and can be adjusted as needed. Such a setup is sometimes referred to as having a "synchronous condenser."
Non Excited or Reluctance Rotor Synchronous Motor
This design uses an iron rotor shaped to favour fixed paths for magnetic flux (Figure 4-13). They typically range from fractional horsepower to about 30 HP.
Figure 4-13: Non Excited Synchronous Motor Rotor
Permanent magnets are sometimes used on the rotors of smaller motors.
Reluctance rotor motors have low power factors during operation. They are also physically larger than the excited type motors of similar power rating.
Single Phase Synchronous Motors
Any single phase stator configuration can be used to make a reluctance type synchronous motor (Figure 4-14).
The rotor is essentially a squirrel cage with some of its bars removed in positions that favour specific magnetic flux paths.
During start-up the rotor lags the rotating magnetic field, similar to an induction motor.
When the motor approaches synchronous speed, reluctance torque causes the rotor to synchronize with the stator field.
This design is used in low power applications where synchronous speed is required.
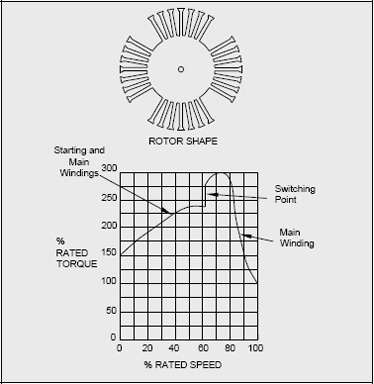
Figure 4-14: Single Phase Reluctance Motor
i. Hysterisis Motor
For a hysterisis motor, the rotor is typically a cylinder of magnetically hard steel without any windings or teeth (Figure 4-15).
Stator windings are usually a split capacitor type, with the capacitor chosen to approximate two phase operation as closely as possible.
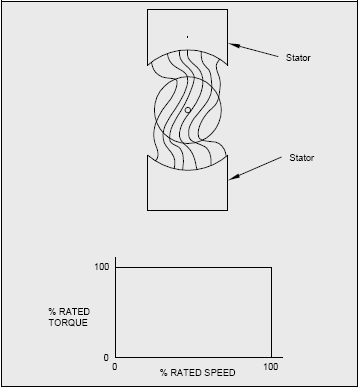
Figure 4-15: Hysterisis Motor
The high retentivity of the rotor material causes its magnetic orientation to lag behind the rotating magnetic field by a fraction of a rotation.
Interaction between the rotating field and the rotor's magnetic polarity subjects the rotor to a torque which is consistent from standstill to synchronous speed.
This design allows synchronization of high inertia loads.
Operation is generally smooth and quiet because of the smooth rotor periphery.
Hysterisis motors are generally used in low power application such as clocks.
j. Universal Motors
Universal motors are series wound, with rotor circuitry similar to DC motors (Figure 4-16).
The term universal results from their ability to operate on either DC or AC power.
The operation and construction of these motors closely resemble DC motors, with components designed for efficiency on AC up to the line frequency (See Section 5 b).
Operating speeds typically range from 3,000 to 15,000 RPM. The speed will drop with increasing load.
A high horsepower to size ratio is characteristic of this design.
Maintenance requirements per hour of operation are higher than other designs due to the brush/commutator setup.
On motors with accessible brushes (typically coin-slot screw plugs on either side of the motor), brush condition should be checked occasionally to ensure adequate brush material remains. When the brush is getting close to the holder or braided end lead, it should be replaced with the same size and type of brush. If the brush runs out and the holder touches the commutator, there will be a lot of sparking when the motor is operated. Should this occur, stop the motor immediately. Permanent damage may have been caused, but new brushes may remedy the situation.
Common uses of these motors include low duty cycle applications such as power saws, drills, vacuum cleaners and lawn mowers. Sizes up to about 2 HP are common.
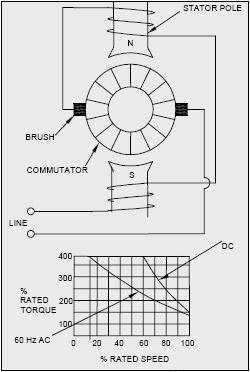
Figure 4-16: Universal Motor
Previous: Operating Principles | Table of Contents | Next: DC Motors
Page details
- Date modified: